ERMA (Efficacité des Robots Mobiles Autonomes pour le transport et le chargement / déchargement des équipements) est porté par l’équipe PECASE, en collaboration avec ATG Technologies (Avignon) et STMicroelectronics (Rousset). ERMA (1,52 M€, LIS 427 k€) est financé par BPIFrance dans le cadre de France 2030 et labellisé IPCEI (Projet Important d'Intérêt Européen Commun). ERMA a pour objectif de proposer des solutions technologiques permettant d’augmenter la productivité de STMicroelectronics et ainsi de mieux affronter la concurrence tout en minimisant les risques au travail (troubles musculo-squelettiques) et les erreurs humaines.
- Contact : Guillaume GRATON, équipe PECASE
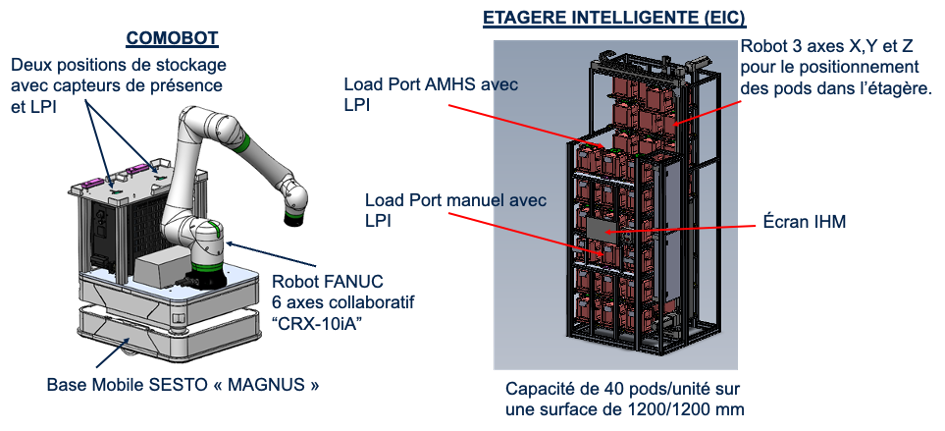
Par ailleurs, sous un autre point de vue, le but est de mieux gérer la production en recentrant l’humain sur des tâches à plus forte valeur ajoutée tout en augmentant la sécurité et la traçabilité dans l'unité de fabrication. Ainsi l’innovation de rupture liée à ce projet réside dans la mise en œuvre d’un robot mobile, d’un bras cobot (à six degrés de liberté) et d’une étagère intelligente (avec un bras à trois degrés de liberté) dans un environnement contraint comme celui du semi-conducteur, tout en y incorporant les interactions avec les humains, des contraintes techniques d’intégration (stabilité mécanique), la gestion des batteries et du flux de données.
Plus précisément, dans le cadre de ce projet, l’équipe PECASE du LIS va s’intéresser, à la mise en place de méthodes permettant de surveiller les robots grâce aux données récoltées tout en respectant les contraintes précédemment citées. Quatre éléments majeurs seront surveillés à savoir les roues du robot, les batteries, les axes du bras cobotique ainsi que l’étagère intelligente. Cela se traduira par le développement d’algorithmes d’intelligence artificielle pour la surveillance des robots afin de pouvoir réaliser la détection précoce de ces défauts, de pouvoir suivre l’état de santé des éléments surveillés et de pouvoir mettre en place le pronostic des défaillances en fonction des sollicitations et de conditions d’utilisation. Cette surveillance et la prédiction sont cruciales pour la prise de décision quant à l’allocation et la gestion des robots pour les diverses missions au niveau Flotte, mais aussi afin de s‘assurer de la bonne réalisation des missions dans le temps imparti et l’amélioration de la sécurité dans la FAB en évitant les engorgements.